


Hi, I'm Hermann, a junior professor at the Lamarr Institute / Uni Bonn. Previously, I worked as a PostDoc in the Computer Vision and Geometry Lab of ETH Zürich. For my PhD I was part of the Autonomous Systems Lab at ETH Zürich.
My research focuses on embodied perception. I strive to build models and methods to understand an agent's environment semantically and geometrically. Recently, I am most interested in interactions with the environment for applications such as robotic manipulation, video understanding, and mixed-reality.
Here is my lab website.
Loop Closure From Two Views: Revisiting PGO for Scalable Trajectory Estimation Through Monocular Priors
T Yi Lim, B Sun, M Pollefeys, H Blum
Hoi!-A Multimodal Dataset for Force-Grounded, Cross-View Articulated Manipulation
T Engelbracht, R Zurbrügg, M Wohlrapp, M Büchner, A Valada, M Pollefeys, H Blum, Z Bauer

FunFact: Building Probabilistic Functional 3D Scene Graphs via Factor-Graph Reasoning
Z Fu, R Zurbrügg, K Qu, M Pollefeys, M Hutter, H Blum, Z Bauer
SNI-SLAM++: Tightly-Coupled Semantic Neural Implicit SLAM
S Zhu, G Wang, H Blum, Z Wang, G Zhang, D Cremers, M Pollefeys, H Wang
osmAG-LLM: Zero-Shot Open-Vocabulary Object Navigation via Semantic Maps and Large Language Models Reasoning
F Xie, S Schwertfeger, H Blum
OpenFrontier: General Navigation with Visual-Language Grounded Frontiers
E Padilla, B Sun, M Pollefeys, H Blum
Articulated 3D Scene Graphs for Open-World Mobile Manipulation
M Büchner, A Röfer, T Engelbracht, T Welschehold, Z Bauer, H Blum, ...
Open-Vocabulary and Semantic-Aware Reasoning for Search and Retrieval of Objects in Dynamic and Concealed Spaces
R Menon, Y Schmiede, M Bennewitz, H Blum
Hoi!--A Multimodal Dataset for Force-Grounded, Cross-View Articulated Manipulation
T Engelbracht, R Zurbrügg, M Wohlrapp, M Büchner, A Valada, ...
3D-MOOD: Lifting 2D to 3D for Monocular Open-Set Object Detection
Y Yang, L Piccinelli, M Segu, S Li, R Huang, Y Fu, M Pollefeys, H Blum, Z Bauer
ActLoc: Learning to Localize on the Move via Active Viewpoint Selection
B Sun, L Di Giammarino, H Blum, M Pollefeys
FunGraph: Functionality Aware 3D Scene Graphs for Language-Prompted Scene Interaction
D Rotondi, F Scaparro, H Blum, K O. Arras
SpotLight: Robotic Scene Understanding through Interaction and Affordance Detection
T Engelbracht, R Zurbrügg, M Pollefeys, H Blum, Z Bauer
FrontierNet: Learning Visual Cues to Explore
B Sun, H Chen, S Leutenegger, C Cadena, M Pollefeys, H Blum
CroCoDL: Cross-device Collaborative Dataset for Localization
H Blum, A Mercurio, J O’Reilly, T Engelbracht, M Dusmanu, M Pollefeys, Z Bauer
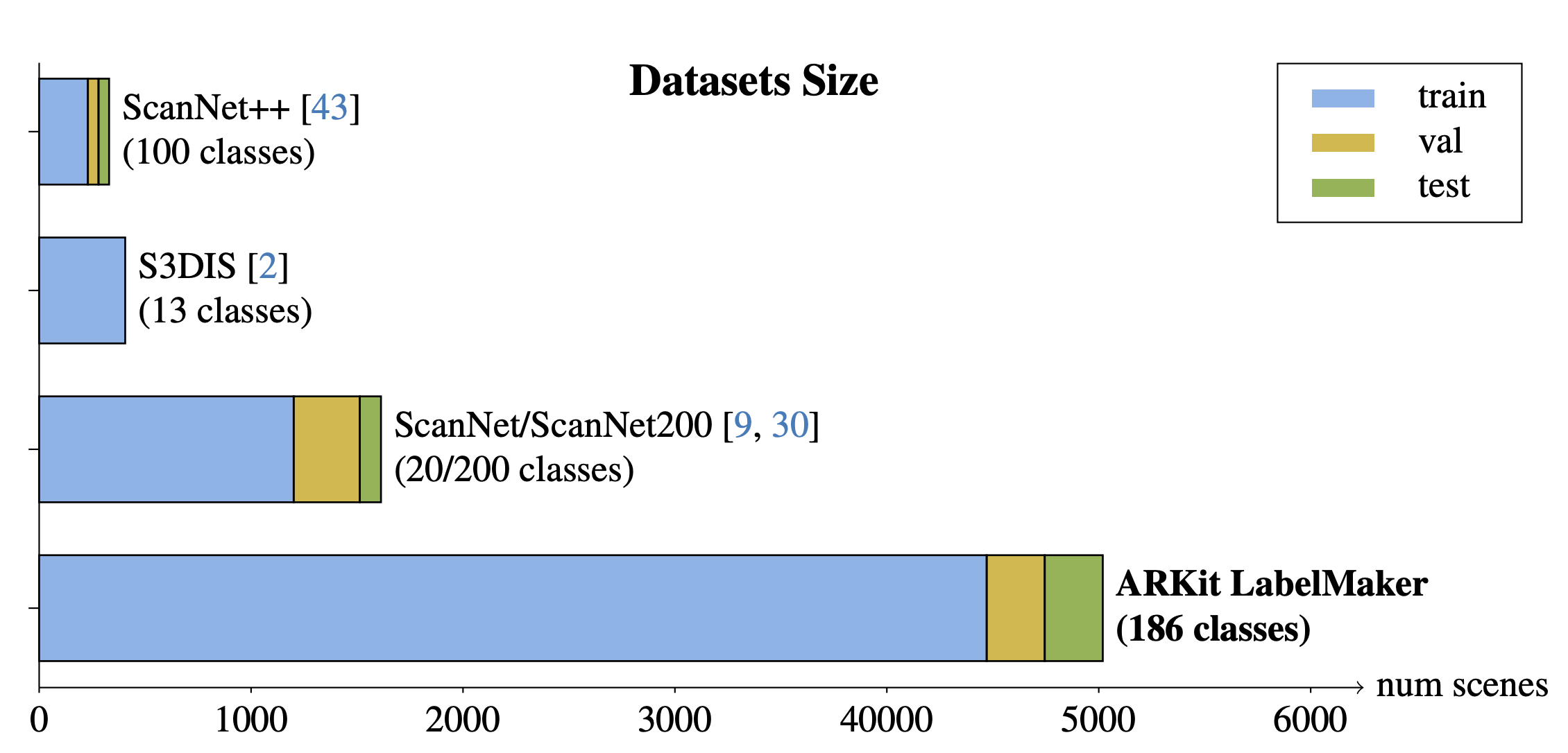
ARKit LabelMaker: A New Scale for Indoor 3D Scene Understanding
G Ji, S Weder, F Engelmann, M Pollefeys, H Blum
DepthSplat: Connecting Gaussian Splatting and Depth
H Xu, S Peng, F Wang, H Blum, D Barath, A Geiger, M Pollefeys

Spot-On: A Mixed Reality Interface for Multi-Robot Cooperation
T Engelbracht, P Lukovic, T Behrens, K Lascheit, R Zurbrügg, M Pollefeys, ...
Lost & Found: Tracking Changes from Egocentric Observations in 3D Dynamic Scene Graphs
T Behrens, R Zurbrügg, M Pollefeys, Z Bauer, H Blum
HoloSpot: Intuitive Object Manipulation via Mixed Reality Drag-and-Drop
P Soler Garcia, P Lukovic, L Reynaud, A Sgobbi, F Bruni, M Brun, M Zünd, R Bollati, M Pollefeys, H Blum, Z Bauer
Learning Where to Look: Self-supervised Viewpoint Selection for Active Localization Using Geometrical Information
L Di Giammarino, B Sun, G Grisetti, M Pollefeys, H Blum, D Barath
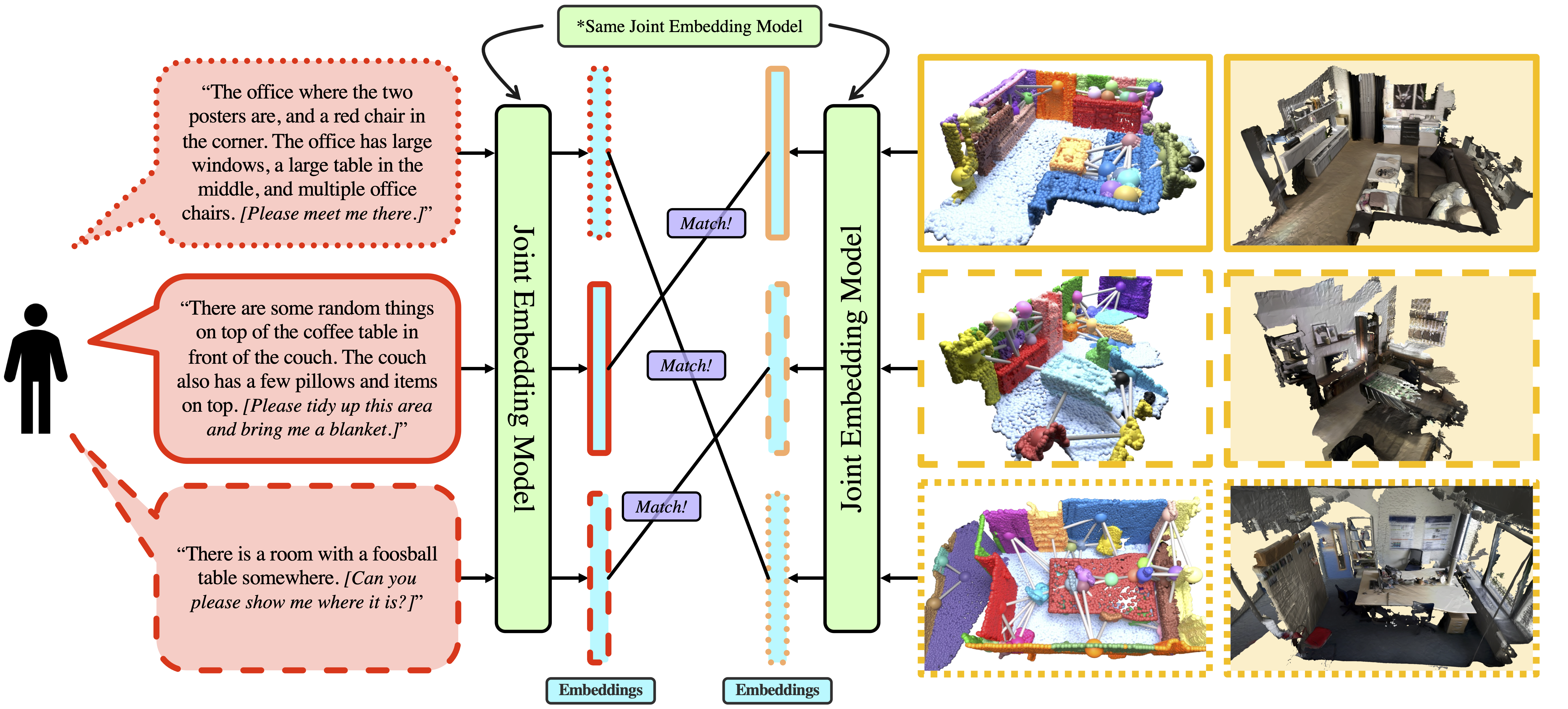
“Where am I?” Scene Retrieval with Language
J Chen, D Barath, I Armeni, M Pollefeys, H Blum
OpenDAS: Open-Vocabulary Domain Adaptation for Segmentation
G Yilmaz, S Peng, M Pollefeys, F Engelmann, H Blum
SNI-SLAM: Semantic Neural Implicit SLAM
S Zhu, G Wang, H Blum, J Liu, L Song, M Pollefeys, H Wang
A 3D Mixed Reality Interface for Human-Robot Teaming
J Chen, B Sun, M Pollefeys, H Blum
Active Visual Localization for Multi-Agent Collaboration: A Data-Driven Approach
M Hanlon, B Sun, M Pollefeys, H Blum
🏆 Best Paper at ICRA 24 Mobile Manipulation Workshop
Spot-Compose: A Framework for Open-Vocabulary Object Retrieval and Drawer Manipulation in Point Clouds
O Lemke, Z Bauer, R Zurbrügg, M Pollefeys, F Engelmann, H Blum
🏆 Best Paper at ICRA 24 Mobile Manipulation Workshop
fully automatic labels on the quality level of ScanNet
LabelMaker: Automatic Semantic Label Generation from RGB-D Trajectories
S Weder*, H Blum*, F Engelmann, M Pollefeys
fully automatic labels on the quality level of ScanNet
Unsupervised Continual Semantic Adaptation through Neural Rendering
Z Liu, F Milano, J Frey, M Hutter, R Siegwart, H Blum, C Cadena
my PhD thesis
Self-improving, Open-World Robotic Scene Understanding
H Blum, undefined
my PhD thesis
🏆 Best Paper Runner-up at the 2021 NeurIPS Robot Learning Workshop
Continual Adaptation of Semantic Segmentation Using Complementary 2D-3D Data Representations
J Frey, H Blum, F Milano, R Siegwart, C Cadena
🏆 Best Paper Runner-up at the 2021 NeurIPS Robot Learning Workshop
mm-precise RGBD pointclouds
SL Sensor: An open-source, real-time and robot operating system-based structured light sensor for high accuracy construction robotic applications
mm-precise RGBD pointclouds
SCIM: Simultaneous Clustering, Inference, and Mapping for Open-World Semantic Scene Understanding
H Blum, M G. Müller, A Gawel, R Siegwart, C Cadena
🏆 Best Paper at IROS 2023 WS 'Frontier Vision & Learning Techniques'
See Yourself in Others: Attending Multiple Tasks for Own Failure Detection
🏆 Best Paper at IROS 2023 WS 'Frontier Vision & Learning Techniques'
Interactive OAISYS: A photorealistic terrain simulation for robotics research
M G Müller, J Lim, L Schmid, H Blum, W Stürzl, undefined Abel Gawel, R Siegwart, R Triebel
integrates our NeurIPS workshop work into a fully autonomous press-start-and-leave domain adaptation
Embodied Active Domain Adaptation for Semantic Segmentation via Informative Path Planning
integrates our NeurIPS workshop work into a fully autonomous press-start-and-leave domain adaptation
Global Localization in Meshes
Precise Robot Localization in Architectural 3D Plans
Pixel-wise Anomaly Detection in Complex Driving Scenes
G Di Biase*, H Blum*, R Siegwart, C Cadena
Our new concept for robots that learn on their own
Self-Improving Semantic Perception for Indoor Localisation
Our new concept for robots that learn on their own
SegmentMeIfYouCan: A Benchmark for Anomaly Segmentation
R Chan*, K Lis*, S Uhlemeyer*, H Blum*, S Honari, R Siegwart, P Fua, M Salzmann, M Rottmann
Accurate Mapping and Planning for Autonomous Racing
L Andresen*, A Brandemuehl*, A Hönger*, B Kuan*, N Vödisch*, H Blum, V Reijgwart, L Bernreiter, L Schaupp, J J Chung, M Bürki, M R Oswald, R Siegwart, A Gawel
Online Synchronization of Building Model for On-Site Mobile Robotic Construction
Fishyscapes: A benchmark for safe semantic segmentation in autonomous driving
first mayor work of our interdisciplinary construction-robotics team
A Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction
A Gawel, H Blum, J Pankert, K Krämer, L Bartolomei, S Ercan, F Farshidian, M Chli, F Gramazio, R Siegwart, M Hutter, T Sandy
first mayor work of our interdisciplinary construction-robotics team
Active Learning for UAV-based Semantic Mapping
Learning Densities in Feature Space for Reliable Segmentation of Indoor Scenes
The Fishyscapes Benchmark: Measuring Blind Spots in Semantic Segmentation
H Blum*, PE Sarlin*, J Nieto, R Siegwart, C Cadena

Modular Sensor Fusion for Semantic Segmentation
H Blum, A Gawel, R Siegwart, C Cadena
Obstacle avoidance and target acquisition for robot navigation using a mixed signal analog/digital neuromorphic processing system
Thanks to 0melapics / Freepik for the robot decorations.
This website has a low carbon footprint and is hosted on green energy.